


{kind=link}
Desarrollar un robotic exitoso requiere una cuidadosa selección de tecnologías. Las malas decisiones pueden provocar costosos contratiempos, problemas de confiabilidad o problemas de preparación para el futuro. Aprovechando la amplia experiencia de nuestro trabajo en OLógicaque se especializa en robótica y electrónica de consumo, aquí hay 10 tecnologías que debe evitar para garantizar que su robotic sea escalable, confiable, innovador y fabricable.
1. Microcontroladores obsoletos
Los microcontroladores (MCU) obsoletos pueden limitar las capacidades de su robotic al restringir la potencia de procesamiento y la eficiencia energética. Dado que la robótica exige cada vez más funciones de inteligencia synthetic y computación de vanguardia, el uso de MCU obsoletas cut back la flexibilidad y la adaptabilidad. Opciones avanzadas como Supersónico NVIDIA o la plataforma AIoT de MediaTek ofrecen la potencia de procesamiento necesaria para los robots modernos.
2. Ecosistemas de software program propietario
Si bien las plataformas de software program propietario pueden parecer una opción segura debido a su soporte integral, a menudo imponen limitaciones en cuanto a flexibilidad y escalabilidad. Ecosistemas de software program de código abierto, como el Sistema operativo robótico (ROS), permiten una mayor personalización e integración con otros sistemas. En el futuro, le dará a su producto robótico más espacio para evolucionar. En esta lista de 10 tecnologías a evitar en robótica, esta es muy importante.
3. Sensores de función única
En una period en la que los sensores inteligentes y multifuncionales dominan el panorama de la robótica, los sensores de función única se están quedando obsoletos. Sensores avanzados como LIDAR, cámaras de profundidad fabricadas por empresas como Intel u Orbbec, o sistemas de visión mejorados con IA, ofrecen versatilidad y precisión en entornos complejos. Evite la tentación de utilizar sensores de función única como el sonar, ya que pueden limitar significativamente las capacidades de su robotic. Intel escinde su división RealSense como empresa independiente.

El módulo de profundidad Intel RealSense D421. | Crédito: Intel
4. Protocolos de comunicación heredados
Los robots dependen cada vez más de sistemas de comunicación rápidos, seguros y escalables, especialmente en entornos de IoT. Los protocolos obsoletos como Zigbee o las versiones antiguas de Bluetooth pueden parecer rentables, pero no pueden igualar la velocidad o confiabilidad de estándares más nuevos como Wi-Fi 6, BLE 5.0 o 5G. Ceñirse a sistemas de comunicación heredados puede obstaculizar la capacidad de su robotic para operar de manera eficiente, especialmente en entornos complejos con altas demandas de crimson.

¡Regístrese hoy para ahorrar un 40 % en pases para la conferencia!
5. Conexiones USB
Si bien el USB se usa comúnmente para la conectividad, es una opción arriesgada en aplicaciones de robótica debido a su inestabilidad en entornos con movimiento y vibración constantes. Los conectores USB son propensos a problemas como la nueva enumeración o el bloqueo del sistema, a menudo provocados por el movimiento de un robotic. Para sistemas críticos, considere alternativas más estables y resistentes como Ethernet o GMSL y conectores reforzados para evitar desconexiones aleatorias durante las operaciones. Este es otro elemento elementary en nuestra lista de 10 tecnologías que se deben evitar en robótica.
6. Conectores sin bloqueo
En aplicaciones de robótica en movimiento, los conectores sin bloqueo son un punto frecuente de falla. Los conectores estándar de consumo tienden a aflojarse o desconectarse debido a la vibración y el movimiento constantes, lo que provoca problemas de rendimiento impredecibles. Los conectores de bloqueo, como los utilizados en aplicaciones industriales y automotrices, garantizan una conexión segura y confiable incluso en entornos desafiantes. Evite el uso de conectores sin bloqueo en cualquier aplicación donde la estabilidad sea essential y utilice conectores con bloqueo de empresas como Molex o JST.
7. Procesamiento de datos con poco ancho de banda
Las aplicaciones de robótica suelen implicar el procesamiento de grandes cantidades de datos de sensores en tiempo actual. Optar por sistemas de procesamiento de datos de bajo ancho de banda puede crear cuellos de botella, ralentizar la toma de decisiones e impactar el rendimiento del robotic en entornos dinámicos. El uso de soluciones informáticas de vanguardia de gran ancho de banda permite un procesamiento de datos más rápido y preciso, lo cual es esencial para tareas como la detección, navegación y manipulación de obstáculos. Normalmente no basta con tener una conexión WiFi con el robotic. Tener acceso a una crimson 4G o 5G en paralelo es elementary para una conectividad ininterrumpida.
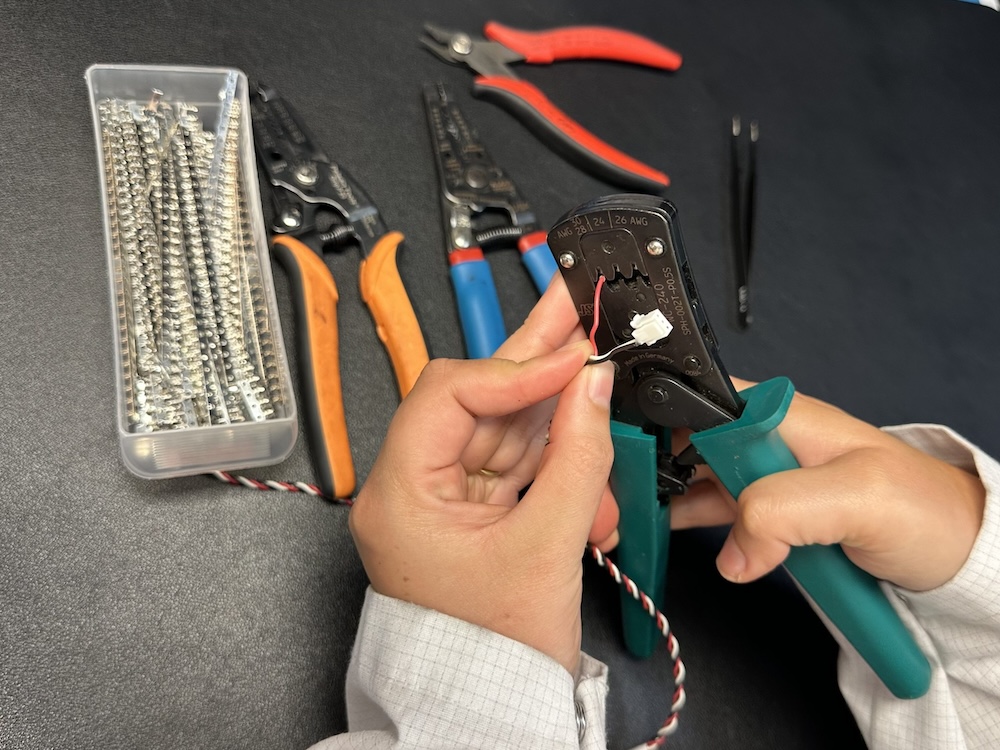
8. Arneses de cableado o conectores de estaño baratos
Los arneses de cableado baratos y los conectores estañados pueden parecer una forma de reducir costos, pero pueden generar importantes problemas de confiabilidad, especialmente en aplicaciones de robótica donde la durabilidad y la conectividad constante son cruciales. Los conectores de estaño, en specific, son propensos a oxidarse con el tiempo, lo que puede provocar una mala conductividad e incluso fallos totales del sistema. Los mazos de cables baratos pueden sufrir un aislamiento deficiente o conexiones débiles, lo que provoca fallas eléctricas intermitentes, pérdida de señal o incluso cortocircuitos. Opte por materiales de alta calidad, como conectores chapados en oro y cableado robusto.
9. Diseños mecánicos no modulares.
Un diseño no modular bloquea su robotic en una configuración fija, lo que dificulta futuras actualizaciones o personalizaciones. Los diseños mecánicos modulares brindan la flexibilidad de intercambiar componentes fácilmente, adaptarse a nuevas tecnologías y adaptarse a futuras expansiones. Esto es particularmente importante en industrias donde las aplicaciones robóticas deben evolucionar rápidamente para enfrentar nuevos desafíos. La capacidad de servicio del robotic es elementary con los productos en el campo. Asegúrese de que su ingeniería mecánica esté optimizada para la implementación a escala.
10. Tecnologías de baterías con baja densidad energética
Los robots dependen de una gestión eficiente de la energía para funcionar durante períodos prolongados, especialmente en aplicaciones móviles. Optar por baterías con baja densidad de energía limita el tiempo de funcionamiento y aumenta el tiempo de inactividad para recargar. Tecnologías de baterías obsoletas, como baterías de plomo-ácido selladas (SLA) o baterías de litio prismáticas más antiguas. En su lugar, céntrese en tecnologías de baterías avanzadas como el fosfato de hierro y litio, que ofrecen una mayor densidad de energía y una vida útil operativa más larga.
Conclusión
En el complicado y multidisciplinario campo de la robótica, es essential tomar decisiones informadas sobre qué tecnologías adoptar y cuáles evitar. Esta lista definitivamente puede ayudarte en tu próximo proyecto. Al mantenerse alejado de microcontroladores obsoletos, conectores sin bloqueo, USB en entornos inestables y otras tecnologías mencionadas anteriormente, puede construir un robotic que sea más confiable, escalable y esté listo para demandas futuras.
Con la orientación de empresas experimentadas como OLogic, el desarrollo de su producto se mantendrá a la vanguardia.
Nota del editor: Este artículo se volvió a publicar con permiso de OLogic.
Sobre el autor
 Ted Larson es el director ejecutivo de OLógicauna empresa de subcontratación de investigación y desarrollo centrada en la robótica. OLogic ha trabajado en productos para empresas como Hasbro, Fb, Google, Motorola, HP y Amazon. Larson es un experto en software program y electrónica con más de 30 años de experiencia en el diseño y construcción de productos comerciales.
Ted Larson es el director ejecutivo de OLógicauna empresa de subcontratación de investigación y desarrollo centrada en la robótica. OLogic ha trabajado en productos para empresas como Hasbro, Fb, Google, Motorola, HP y Amazon. Larson es un experto en software program y electrónica con más de 30 años de experiencia en el diseño y construcción de productos comerciales.
Antes de OLogic, fundó una empresa de software program de Web llamada Urbanite Community, una plataforma de publicación de contenido de servidor internet para clientes de medios, hizo crecer la empresa hasta contar con más de 70 empleados y recaudó más de 10 millones de dólares en capital privado y capital de riesgo. Antes de Urbanite, Larson ocupó cargos en Hewlett-Packard, Iomega y el Laboratorio Nacional de Los Alamos. Tiene una licenciatura y una maestría en informática de Cal-Poly, San Luis Obispo.