


{kind=link}
Los caracoles son excelentes para escalar superficies verticales, a pesar de que solo tienen una pata de ventosa húmeda. Un nuevo robotic de inspiración biológica trepa paredes imitando ese mecanismo easy pero efectivo, aunque afortunadamente deja un rastro de agua en lugar de moco.
Conocido como robotic de succión deslizante (SSR), el dispositivo de prueba de concepto fue creado por el investigador asociado Tianqi Yue y sus colegas de la Universidad de Bristol. La versión precise pesa sólo 96 gramos (3,4 oz) y cabe cómodamente en la mano de una persona, pero la tecnología podría ampliarse según sea necesario.
En la parte inferior del cuerpo en forma de rotonda del SSR hay una ventosa de 50 mm (2 pulgadas) de ancho. Esa copa está hecha principalmente de poliuretano resistente y versatile, aunque su parte inferior está compuesta de una mezcla de silicona y un polímero hidrófilo (que atrae agua). Un anillo de espuma muy absorbente recorre el perímetro de la ventosa.
Universidad de Bristol
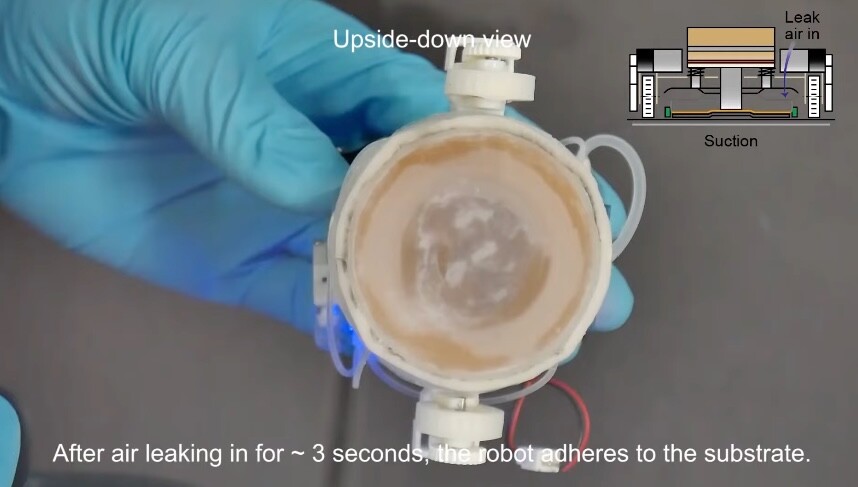
Inicialmente, el robotic se presiona firmemente contra una pared con la mano. Esta acción adhiere el robotic a la pared, pero no le permite moverse.
Para que eso Para que esto suceda, el agua se bombea desde un tanque a bordo, a través de cuatro tubos de silicona hasta el anillo de espuma. Posteriormente, la acción capilar extrae el agua de la espuma y la atraviesa por la parte inferior de la ventosa, formando una fina capa de líquido que proporciona lubricación. y mantiene el sello.
Luego se utilizan dos ruedas motorizadas, una a cada lado de la ventosa, para impulsar el robotic a través de la pared. A pesar de alguno El agua queda en la pared a lo largo del camino del SSR, ese líquido se reemplaza continuamente para mantener una capa efectiva en la parte inferior de la taza. Los caracoles se mueven manteniendo la succión de la misma manera, aunque secretan moco en lugar de agua.
En pruebas de laboratorio, el robotic pudo escalar láminas verticales de vidrio y metallic pintado a velocidades de hasta 19 mm (0,75 pulgadas) por segundo, además podía girar en el lugar e incluso moverse completamente boca abajo a través de la parte inferior de las láminas horizontales. hojas. También fue capaz de transportar una carga útil de hasta 200 g (7 oz) y soportar una fuerza de tracción hacia abajo de 1 kg (2,2 lb).
Con base en estas pruebas, los científicos estiman que el SSR debería tener un tiempo de ejecución en el mundo actual de aproximadamente una hora por carga de batería. Es importante tener en cuenta que el robotic no utiliza ninguna energía para mantener la succión cuando no está en movimiento.
Las posibles aplicaciones del SSR incluyen la inspección y el mantenimiento de palas de turbinas eólicas, cascos de barcos y ventanas de rascacielos.
“Demostramos que la succión deslizante ofrece un bajo consumo de energía, alta eficiencia de adhesión y seguridad, alta capacidad de carga y baja complejidad, dejando solo un rastro de agua que se evapora rápidamente”, cube Tianqi Yue. “El hallazgo más interesante de nuestra investigación es que el mecanismo de succión deslizante propuesto es una nueva estrategia de escalada limpia y avanzará significativamente en el desarrollo de los robots trepadores de próxima generación”.
Recientemente se publicó un artículo sobre la investigación en la revista Comunicaciones de la naturaleza. Puede ver el SSR en acción (en algunos casos usando un suministro de agua externo) en el video a continuación.
Y para ver otro ejemplo reciente de robots inspirados en caracoles, consulte Los robo-caracoles de la Universidad China de Hong Kong que se aferran unos a otros para realizar tareas al aire libre en colaboración.
Mov. 5.4 – Demostraciones de aplicaciones prácticas
Fuente: Universidad de Bristol a través de Noticias