



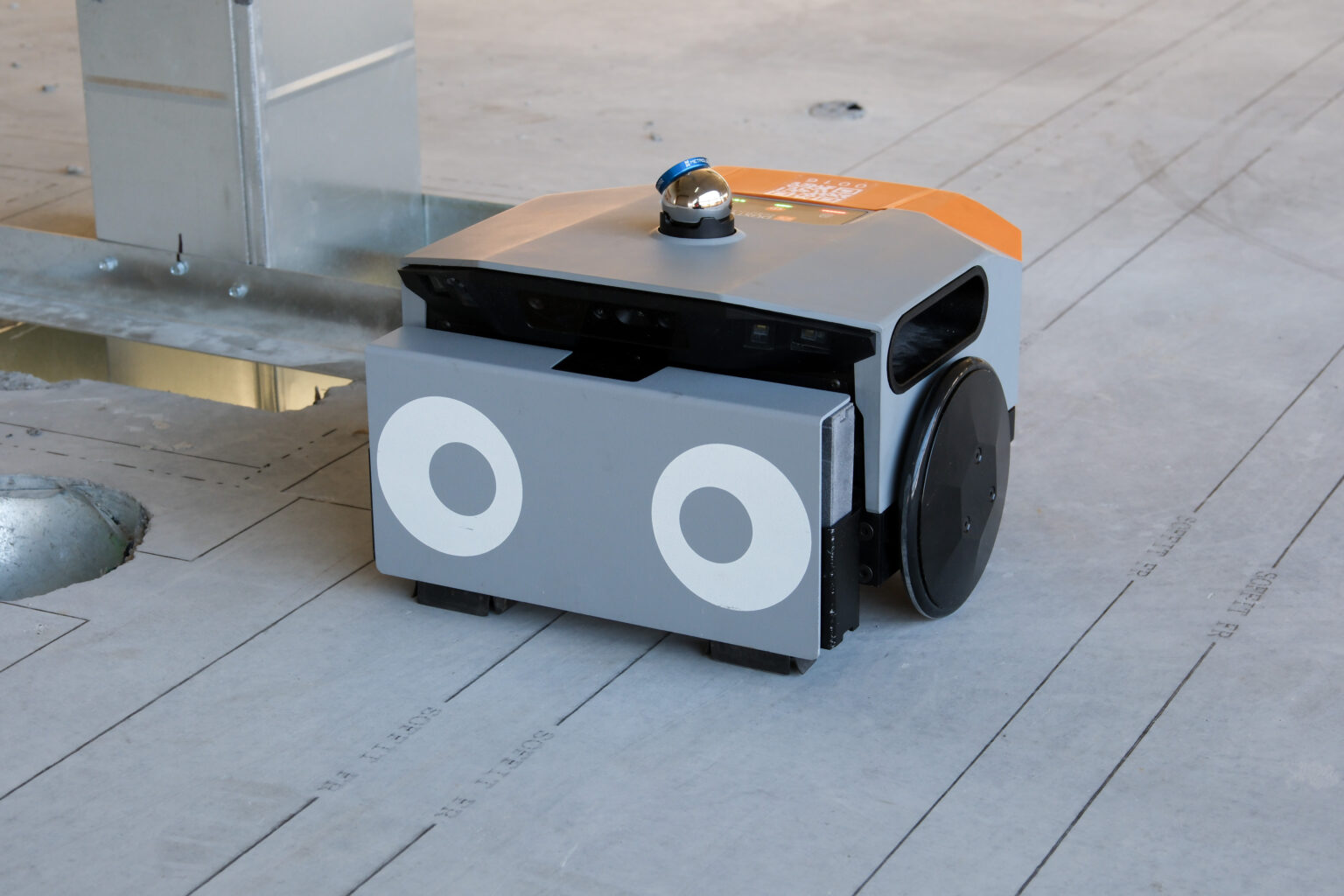
El controlador del controlador de movimiento N-Sequence de dispositivos de movimiento de rendimiento ayuda a la AMR polvorienta a evitar obstáculos, repisas y otros peligros. | Fuente: Robótica Dusty
La industria de la construcción está bajo presión. La escasez de mano de obra, el aumento de los costos de los materiales y la demanda de velocidad y precisión están presionando a los constructores a buscar soluciones automatizadas que aumenten la eficiencia, la seguridad y la sostenibilidad. Dusty Robotics espera usar su tecnología para cambiar esto.
En la mayoría de los casos, los planes están marcados en espacios físicos que usan medios anticuados: dependiendo del sitio, el private puede usar un estación complete (un instrumento de topografía que integra varias herramientas de medición) o tal vez solo medidas de cinta y líneas de tiza para marcar dónde van las cosas. El enfoque no cambió en gran medida de los utilizados hace siglos.
Enormes pilas de copias impresas de plan que detallan cada piso y sistema están cediendo lentamente a las comunicaciones digitales, pero la información aún se comunica manualmente en el sitio, explicó Mike Thompson, ingeniero principal de Dusty Robotics. Con demasiada frecuencia, el modelo 3D de un edificio no es lo que se construye. A medida que varios intercambios presentan sus planes, errores y información anticuada a menudo conducen a diseños incorrectos, retrabajo y retrasos.
Dusty Robotics diseña el Fieldprinter 2
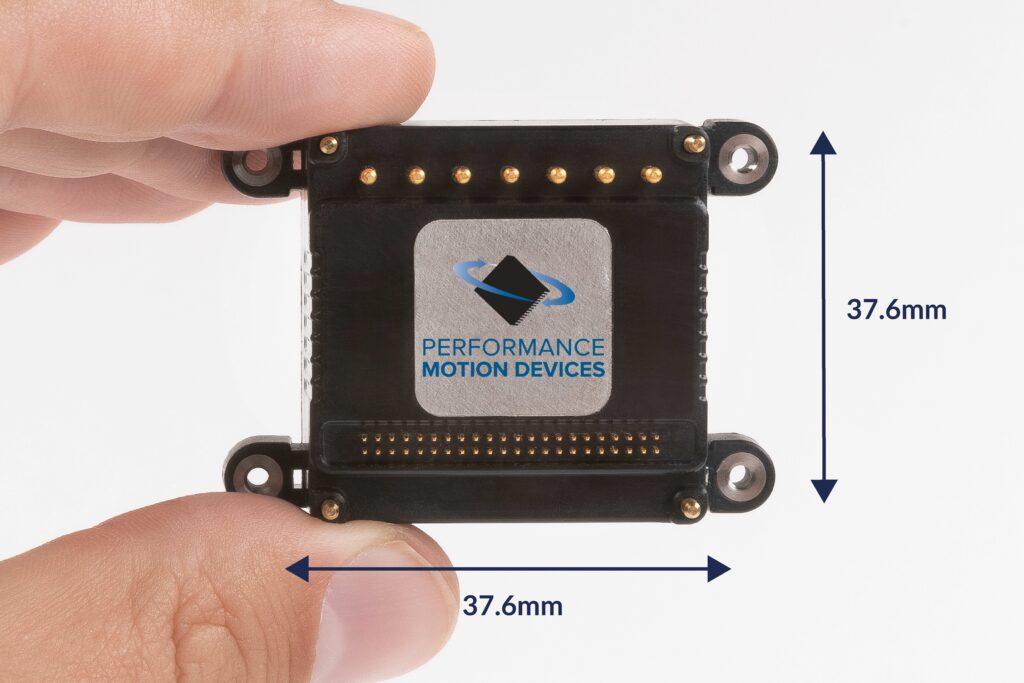
La unidad de management de movimiento ION/CME N-Sequence imparte el diseño polvoriento con el management necesario para una operación automatizada precisa. | Fuente: Dispositivos de movimiento de rendimiento
La startup Dusty Robotics, con sede en Mountain View, California, ha diseñado un robotic móvil autónomo (Amr) llamado Fieldprinter 2 para mapear de forma independiente y marcar los diseños de edificios 3D en 2D construcción pisos con 0.0625 in. exactitud. Con él, los equipos de construcción ya no tienen que verificar constantemente sus computadoras portátiles, iPads y planes de papel para saber qué se debe construir y dónde.
El núcleo de la función de la AMR son dos estándares management de movimiento componentes de dispositivos de movimiento de rendimiento (PMD). El Ion/cme n-series Las unidades proporcionan management y potencia para las dos ruedas delanteras del AMR, y más específicamente, los dos motores eléctricos DC sin escobillas (BLDC) que conducen las ruedas. La rueda trasera del AMR no tiene un disco activo.
Las unidades del controlador colocan al robotic, junto con un conjunto de a bordo sensores que proporcionan información de ubicación precisa, incluidos rastreadores, codificadores y giroscopios de la unidad de medición inercial.
“Queremos un movimiento continuo entre todos los objetos que imprimimos”, dijo Ryan Dimick, ingeniero de management de Dusty Robotics. El sistema debe permitir cambios de perfil constantes a medida que el robotic cambia entre navegación e impresión “.
De hecho, el nuevo FieldPrinter 2 AMR mejora una iteración previa con la ayuda de las conductoras del controlador PMD. El uso de la primera iteración de los controladores de movimiento de otro proveedor creó desafíos para el puesta en marchaLos desarrolladores, incluyendo la incapacidad de comprender y rectificar errores sin soluciones. La nueva solución de controlador de controlador aborda estos problemas y se ajusta a la plataforma existente.
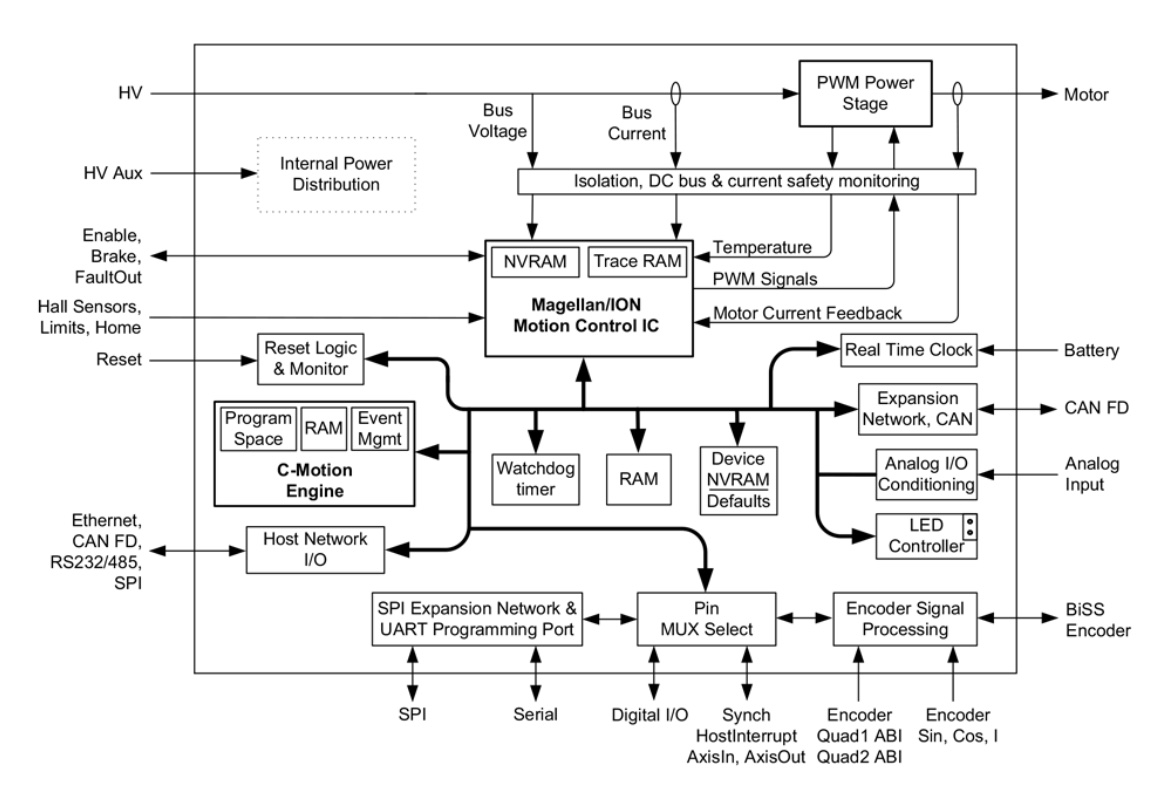
Más específicamente, el controlador de eje único montado en PCB imparte management de movimiento de alto rendimiento, conectividad de pink y amplificación para una unidad todo en uno con un procesador incorporado. Entonces, el robotic puede descargar y ejecutar código. Además, los controladores de controladores brindan visibilidad y personalización robótica polvorienta.
“Cuando nos encontramos con un problema, siempre fue algo que podíamos solucionar”, dijo Dimick. “Superamos cualquier latencia que tuvimos en el pasado y realmente establecemos nuestras propias características de tiempo para los motores y el management del motor”.
Por ejemplo, Dusty quería poder modificar el bucle de management y los parámetros de bucle de management orientados al campo, agregó.
“[Dimick] está constantemente tirando los datos en hojas de cálculo, gráficos y observando todas las entradas y salidas al controlador del motor, y entendiendo qué pequeños ajustes necesitamos “, explicó Thompson.” Esa capacidad de alinearse con sus expectativas, eso fue un gran desafío antes “.
Dimick agregó: “Estamos trabajando en una escala de tiempo a nivel de milisegundos. Obtener información muy rápidamente es importante para todos los controles de ajuste y de alto nivel, y no pudimos alcanzarla antes del PMD”.
La unidad de management de movimiento Ion/CME N-Sequence de PMD es elementary para la precisión de posición del robotic. Las unidades de la serie N de PMD también brindan a los ingenieros acceso a parámetros de management interno para personalizar y solucionar problemas del diseño. | Fuente: Robótica Dusty
PMD ayuda a los cajas de borde polvoriento
Dusty Robotics colaboró estrechamente con el proveedor de controlador de controlador para resolver los desafíos. “Cada vez que estaba integrando el controlador en el producto y tenía preguntas, se apresuraron a saltar en una llamada e incluso lanzaron una versión de depuración personalizada para que yo usara temporalmente para diagnosticar un problema”, dijo Dimick.
Esta colaboración también informó la elección de comunicación industrial del fabricante de AMR.
El controlador La unidad admite la comunicación a través de Ethernet, CAN, RS-232, RS-485 e interfaz periférica en serie. Dusty quería que ciertas comunicaciones vinieran en una versión ligeramente posterior del controlador de controlador.
“Entonces, esperamos, y creo que fuimos uno de los primeros en usarlo realmente”, recordó. “Entonces ayudamos [the supplier] Depurar el firmware y rápidamente devolvieron nuevas versiones para que lo usemos ”.
Un diagrama negro del ion PMD N-Sequence. | Fuente: Dispositivos de movimiento de rendimiento
El Dusty Fieldprinter 2 tiene un rastreador láser que informa continuamente la posición de AMR, pero a menudo el rastreador no tiene una vista del robotic, por lo que la operación es ciega. Pero el controlador del controlador (junto con los sensores del robotic) mantiene el AMR en el camino.
“Cuando el robotic está imprimiendo dentro de un punto ciego, no seen para el rastreador, se basa en la unidad de medición de inercia y los codificadores que atraviesan el controlador. Se basa en todos los demás sensores durante cinco, 10, 15 segundos de impresión continua”, explicó Thompson. “Luego, cuando sale del punto ciego, le cube al rastreador exactamente dónde está. Necesitamos darle a ese rastreador la precisión para que pueda adquirir la señal de manera muy rápida y precisa”.
Aquí, la precisión de la sincronización de sub-milisegundos ayuda a la AMR a manejar los puntos ciegos tan comunes en los lugares de trabajo abarrotados. “Esa información y un movimiento predecible suave permiten que el AMR estime con precisión su ubicación y continúe imprimiendo sin línea de visión al rastreador láser”, dijo Dimick. Esta impresión de punto ciego es la mayor mejora de la nueva versión AMR.
El controlador de controlador también puede aplicar un freno electrónico a los motores de la AMR. Un poco de software program de Dusty, que se ejecuta en uno de los chips del controlador, sirve como un perro guardián. Si pierde la comunicación al robotic, alimenta los motores.
Como lo indica el nombre de la compañía, el sistema de Robotics Dusty debe funcionar en entornos sucios y en todo tipo de clima, en el Sol de Arizona, así como en el piso 14 de un edificio de Chicago en construcción cuando es -20 ° F, y con obstáculos desconocidos y conectividad de Web de forma irregular.
A diferencia de las soluciones competidoras que dejan expuestos a la electrónica smart, PMD dijo que el controlador de controlador utilizado en FieldPrinter 2 viene de serie con un paquete cerrado para proteger los componentes internos. Las iteraciones futuras del robotic podrían ver niveles más altos de integración.
“PMD nos proporciona un camino para nosotros”, dijo Thompson. “Proporcionan los controladores mismos y pueden abrir sus controladores y darnos acceso a las partes independientes para permitirnos crear una solución altamente integrada”.
“Es algo que realmente no hemos seguido, pero nos permite preservar la inversión que los ingenieros han hecho … y aún así hacer el sistema más rápido y ligero de lo que es hoy”, agregó.
 Sobre el autor
Sobre el autor

{kind=link}
Chuck Lewin es el fundador y CEO de Efficiency Movement Gadgets. Lanzado en 1992, PMD tiene su sede cerca de Boston. Es un desarrollador de tecnología de management de movimiento para ciencias de la vida, robótica y automatización industrial. PMD ofrece una amplia gama de productos de management de movimiento electrónico avanzados, incluidos circuitos integrados, amplificadores digitales, unidades digitales y tableros a una base de clientes mundial.
Nota del editor: Este artículo fue sindicado de El informe del robotic sitio de hermanos, Consejos de management de movimiento.