


{kind=link}

Los investigadores del MIT han desarrollado un sensor táctil basado en una cámara que es largo, curvo y tiene la forma de un dedo humano. Su dispositivo, que proporciona detección táctil de alta resolución en un área grande, podría permitir que una mano robótica realice múltiples tipos de agarre. Imagen: Cortesía de los investigadores.
Por Adam Zewe | Noticias del MIT
Imagínese agarrar un objeto pesado, como una llave para tubos, con una mano. Probablemente agarrarías la llave con todos los dedos, no solo con las yemas. Los receptores sensoriales de la piel, que recorren todo el largo de cada dedo, enviarían información al cerebro sobre la herramienta que estás agarrando.
En una mano robótica, los sensores táctiles que utilizan cámaras para obtener información sobre los objetos agarrados son pequeños y planos, por lo que suelen estar ubicados en las yemas de los dedos. Estos robots, a su vez, utilizan sólo las yemas de los dedos para agarrar objetos, normalmente con un movimiento de pellizco. Esto limita las tareas de manipulación que pueden realizar.
Los investigadores del MIT han desarrollado un sensor táctil basado en una cámara que es largo, curvo y tiene la forma de un dedo humano. Su dispositivo proporciona detección táctil de alta resolución en un área grande. El sensor, llamado GelSight Svelte, utiliza dos espejos para reflejar y refractar la luz de modo que una cámara, ubicada en la base del sensor, pueda ver a lo largo de todo el dedo.
Además, los investigadores construyeron el sensor en forma de dedo con una columna vertebral versatile. Al medir cómo se dobla la columna cuando el dedo toca un objeto, pueden estimar la fuerza que se ejerce sobre el sensor.
Utilizaron sensores GelSight Svelte para producir un mano robótica que period capaz de agarrar un objeto pesado como lo haría un humano, usando toda el área de detección de sus tres dedos. La mano también podría realizar los mismos agarres de pellizco comunes a las pinzas robóticas tradicionales.

Este gif muestra una mano robótica que incorpora tres sensores GelSight Svelte en forma de dedo. Los sensores, que proporcionan detección táctil de alta resolución en un área grande, permiten que la mano realice múltiples agarres, incluidos agarres de pellizco que usan solo las yemas de los dedos y agarres eléctricos que usan toda el área de detección de los tres dedos. Crédito: Cortesía de los investigadores.
“Debido a que nuestro nuevo sensor tiene forma de dedo humano, podemos usarlo para realizar diferentes tipos de agarre para diferentes tareas, en lugar de usar agarres tipo pellizco para todo. Hay mucho que puedes hacer con una pinza de mandíbula paralela. Nuestro sensor realmente abre nuevas posibilidades en diferentes tareas de manipulación que podríamos realizar con robots”, afirma Alan (Jialiang) Zhao, estudiante de posgrado en ingeniería mecánica y autor principal de un artículo. papel en GelSight Svelte.
Zhao escribió el artículo con el autor principal Edward Adelson, profesor John y Dorothy Wilson de Ciencias de la Visión en el Departamento de Ciencias Cognitivas y del Cerebro y miembro del Laboratorio de Ciencias de la Computación e Inteligencia Synthetic (CSAIL). La investigación se presentará en la Conferencia IEEE sobre robots y sistemas inteligentes.
espejo espejo
Las cámaras utilizadas en sensores táctiles están limitadas por su tamaño, la distancia focal de sus lentes y sus ángulos de visión. Por lo tanto, estos sensores táctiles tienden a ser pequeños y planos, lo que los limita a la punta de los dedos de un robotic.
Con un área de detección más larga, una que se parezca más a un dedo humano, la cámara necesitaría ubicarse más lejos de la superficie de detección para ver toda el área. Esto es particularmente desafiante debido a las restricciones de tamaño y forma de una pinza robótica.
Zhao y Adelson resolvieron este problema utilizando dos espejos que reflejan y refractan la luz hacia una única cámara situada en la base del dedo.
GelSight Svelte incorpora un espejo plano y en ángulo que se encuentra frente a la cámara y un espejo largo y curvo que se encuentra a lo largo de la parte posterior del sensor. Estos espejos redistribuyen los rayos de luz de la cámara de tal manera que la cámara puede ver el dedo a lo largo de toda la longitud.
Para optimizar la forma, el ángulo y la curvatura de los espejos, los investigadores diseñaron un software program para simular la reflexión y la refracción de la luz.
“Con este software program, podemos jugar fácilmente con la ubicación de los espejos y cómo están curvados para tener una thought de qué tan bien se verá la imagen después de que realmente fabriquemos el sensor”, explica Zhao.
Los espejos, la cámara y dos juegos de LED para iluminación están unidos a una columna vertebral de plástico y revestidos en una piel versatile hecha de gel de silicona. La cámara ve la parte posterior de la piel desde el inside; basándose en la deformación, puede ver dónde se produce el contacto y medir la geometría de la superficie de contacto del objeto.
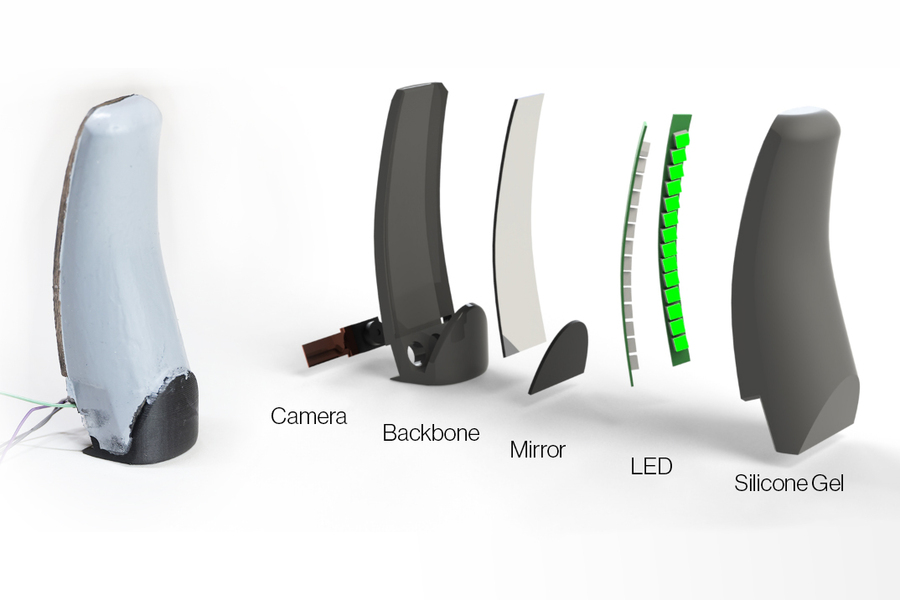
Un desglose de los componentes que componen el sensor táctil related a un dedo. Imagen: Cortesía de los investigadores.
Además, las matrices de LED rojas y verdes dan una thought de qué tan profundamente se presiona el gel cuando se agarra un objeto, debido a la saturación de coloration en diferentes ubicaciones del sensor.
Los investigadores pueden utilizar esta información de saturación de coloration para reconstruir una imagen de profundidad en 3D del objeto que se está captando.
La columna vertebral de plástico del sensor le permite determinar información propioceptiva, como los pares de torsión aplicados al dedo. La columna vertebral se dobla y flexiona cuando se agarra un objeto. Los investigadores utilizan el aprendizaje automático para estimar cuánta fuerza se aplica al sensor, en función de estas deformaciones de la columna vertebral.
Sin embargo, combinar estos elementos en un sensor que funcione no fue una tarea fácil, cube Zhao.
“Asegurarse de tener la curvatura correcta para que el espejo coincida con la que tenemos en la simulación es todo un desafío. Además, me di cuenta de que existen algunos tipos de superpegamento que inhiben el curado del silicio. Fueron necesarios muchos experimentos para crear un sensor que realmente funcionara”, añade.
Agarre versátil
Una vez que perfeccionaron el diseño, los investigadores probaron el GelSight Svelte presionando objetos, como un tornillo, en diferentes ubicaciones del sensor para verificar la claridad de la imagen y ver qué tan bien podía determinar la forma del objeto.
También utilizaron tres sensores para construir una mano GelSight Svelte que puede realizar múltiples agarres, incluido un agarre de pellizco, un agarre de pellizco lateral y un agarre de poder que utiliza toda el área de detección de los tres dedos. La mayoría de las manos robóticas, que tienen forma de goteros de mandíbulas paralelas, sólo pueden realizar agarres de pellizco.
Un agarre eléctrico con tres dedos permite que una mano robótica sostenga un objeto más pesado de manera más estable. Sin embargo, los agarres con pellizco siguen siendo útiles cuando un objeto es muy pequeño. Ser capaz de realizar ambos tipos de agarre con una mano le daría al robotic más versatilidad, afirma.
En el futuro, los investigadores planean mejorar el GelSight Svelte para que el sensor esté articulado y pueda doblarse en las articulaciones, más como un dedo humano.
“Los sensores táctiles ópticos permiten a los robots utilizar cámaras económicas para recopilar imágenes de alta resolución del contacto de la superficie y, al observar la deformación de una superficie versatile, el robotic estima la forma del contacto y las fuerzas aplicadas. Este trabajo representa un avance en el diseño de los dedos GelSight, con mejoras en la cobertura completa de los dedos y la capacidad de aproximar los pares de deflexión de flexión utilizando diferencias de imagen y aprendizaje automático”, cube Monroe Kennedy III, profesor asistente de ingeniería mecánica en la Universidad de Stanford, quien fue no involucrado con esta investigación. “Mejorar el sentido del tacto de un robotic para acercarse a la capacidad humana es una necesidad y quizás el problema catalizador para desarrollar robots capaces de trabajar en tareas complejas y diestras”.
Esta investigación cuenta con el apoyo, en parte, del Instituto de Investigación Toyota.

Noticias del MIT