


{kind=link}
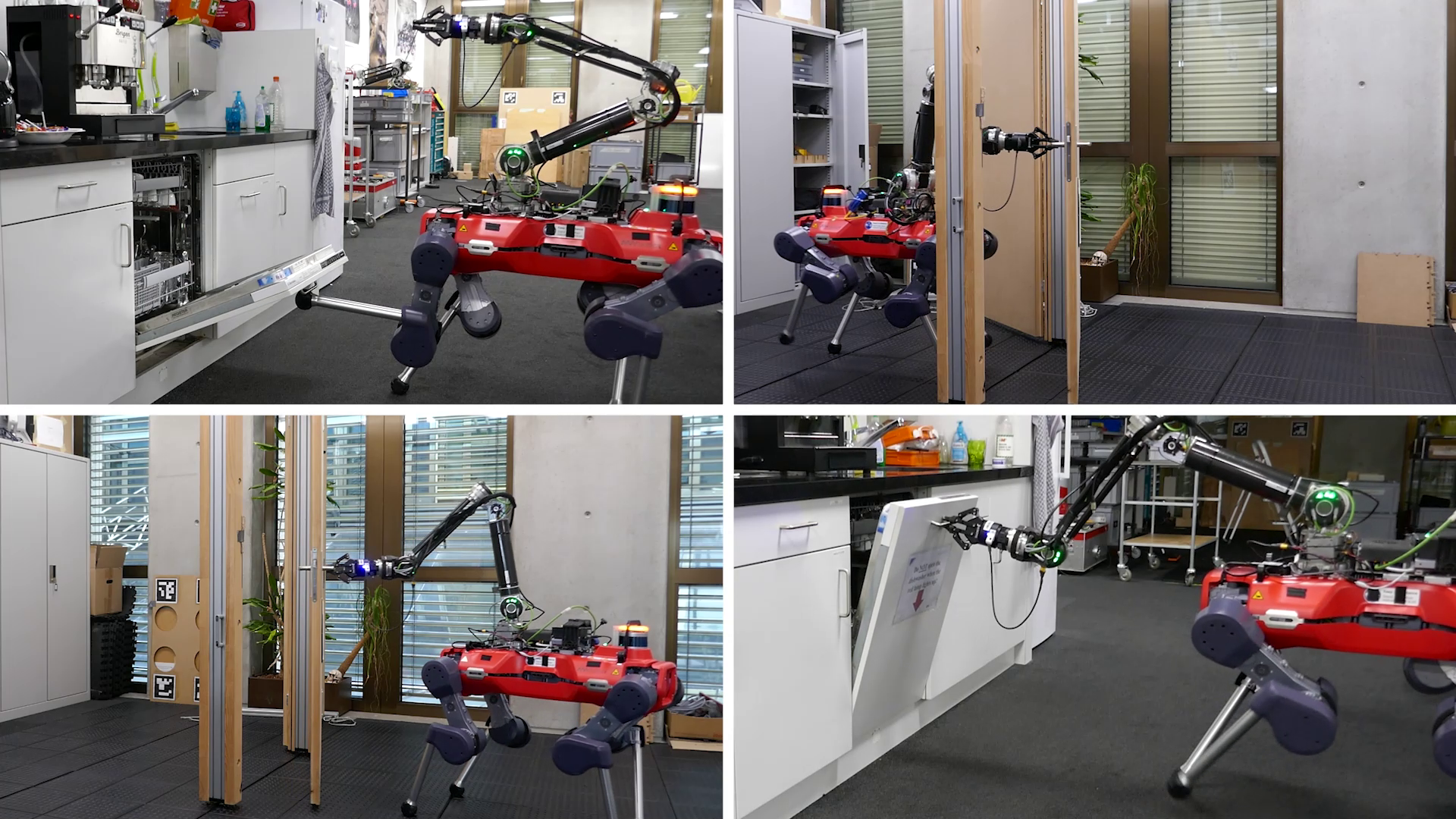
Imagen del papel “Planificación y management multicontacto versátiles para manipulación locomotora con patas“. © Asociación Estadounidense para el Avance de la Ciencia
Tuvimos la oportunidad de entrevistar a Jean Pierre Sleiman, autor del artículo “Versatile multicontact Planning and management for legged loco-manipulation”, publicado recientemente en Robótica científica.
¿Cuál es el tema de la investigación en su artículo?
El tema de investigación se centra en el desarrollo de una arquitectura de planificación y management basada en modelos que permita a los manipuladores móviles con patas abordar diversos problemas de manipulación locomotora (es decir, problemas de manipulación que involucran inherentemente un elemento de locomoción). Nuestro estudio se centró específicamente en tareas que requerirían múltiples interacciones de contacto para resolverse, en lugar de aplicaciones de escoger y colocar. Para garantizar que nuestro enfoque no se limite a entornos de simulación, lo aplicamos para resolver tareas del mundo actual con un sistema de patas que consiste en la plataforma cuadrúpeda ANYmal equipada con DynaArm, un brazo robótico de 6 grados de libertad hecho a medida.
¿Podría contarnos sobre las implicaciones de su investigación y por qué es un área interesante de estudio?
La investigación fue impulsada por el deseo de crear robots de este tipo, es decir, manipuladores móviles con patas, capaces de resolver una variedad de tareas del mundo actual, como atravesar puertas, abrir y cerrar lavavajillas, manipular válvulas en un entorno industrial, and many others. Un enfoque estándar habría sido abordar cada tarea de forma particular person e independiente dedicando una cantidad sustancial de esfuerzo de ingeniería para crear los comportamientos deseados:
Esto generalmente se logra mediante el uso de máquinas de estado codificadas en las que el diseñador especifica una secuencia de subobjetivos (por ejemplo, agarrar la manija de la puerta, abrir la puerta en un ángulo deseado, sostener la puerta con uno de los pies, mover el brazo al otro lado de la puerta, atravesar la puerta mientras la cierra, and many others.). Alternativamente, un experto humano puede demostrar cómo resolver la tarea teleoperando el robotic, registrando su movimiento y haciendo que el robotic aprenda a imitar el comportamiento registrado.
Sin embargo, este proceso es muy lento, tedioso y propenso a errores de diseño de ingeniería. Para evitar esta carga en cada nueva tarea, la investigación optó por un enfoque más estructurado en forma de un planificador único que puede descubrir automáticamente los comportamientos necesarios para una amplia gama de tareas de manipulación locomotora, sin requerir ninguna guía detallada para ninguna de ellas. .
¿Podrías explicar tu metodología?
La thought clave que subyace a nuestra metodología fue que todas las tareas de manipulación de locomotoras que pretendíamos resolver pueden modelarse como problemas de planificación de tareas y movimientos (TAMP). TAMP es un marco bien establecido que se ha utilizado principalmente para resolver problemas de manipulación secuencial en los que el robotic ya posee un conjunto de habilidades primitivas (por ejemplo, recoger objetos, colocar objetos, moverse hacia un objeto, lanzar objetos, and many others.), pero aún tiene integrarlos adecuadamente para resolver tareas más complejas a largo plazo.
Esta perspectiva nos permitió diseñar una única formulación de optimización de dos niveles que puede abarcar todas nuestras tareas y explotar el conocimiento específico del dominio, en lugar del conocimiento específico de la tarea. Al combinar esto con las fortalezas bien establecidas de diferentes técnicas de planificación (optimización de trayectoria, búsqueda de gráficos informados y planificación basada en muestreo), pudimos lograr una estrategia de búsqueda efectiva que resuelve el problema de optimización.
La principal novedad técnica en nuestro trabajo radica en la Módulo de planificación de contactos múltiples sin conexiónrepresentado en Módulo B de Figura 1 en el papel. Su configuración normal se puede resumir de la siguiente manera: a partir de un conjunto definido por el usuario de efectores finales del robotic (p. ej., pie delantero izquierdo, pie delantero derecho, pinza, and many others.) y posibilidades de objetos (estos describen dónde el robotic puede interactuar con el objeto), se introduce un estado discreto que captura la combinación de todos los pares de contactos. Dado un estado inicial y objetivo (por ejemplo, el robotic debería terminar detrás de la puerta), el planificador de contactos múltiples resuelve un problema de consulta única haciendo crecer incrementalmente un árbol a través de una búsqueda de dos niveles sobre modos de contacto factibles junto con el robotic continuo. -trayectorias de objetos. El plan resultante se mejora con una única optimización de trayectoria de largo horizonte sobre la secuencia de contactos descubierta.
¿Cuáles fueron sus principales hallazgos?
Descubrimos que nuestro marco de planificación fue capaz de descubrir rápidamente planes complejos de contactos múltiples para diversas tareas de manipulación locomotora, a pesar de haberle proporcionado una orientación mínima. Por ejemplo, para el escenario de cruce de puerta, especificamos las posibilidades de la puerta (es decir, la manija, la superficie posterior y la superficie frontal) y solo proporcionamos un objetivo escaso simplemente pidiéndole al robotic que termine detrás de la puerta. Además, descubrimos que los comportamientos generados son físicamente consistentes y pueden ejecutarse de manera confiable con un manipulador móvil con patas reales.
¿Qué otros trabajos está planeando en esta área?
Vemos el marco presentado como un trampolín hacia el desarrollo de un sistema de manipulación locomotora totalmente autónomo. Sin embargo, vemos algunas limitaciones que pretendemos abordar en trabajos futuros. Estas limitaciones están relacionadas principalmente con la fase de ejecución de la tarea, donde el seguimiento de los comportamientos generados sobre la base de entornos premodelados sólo es viable bajo el supuesto de una descripción razonablemente precisa, que no siempre es sencilla de definir.
La solidez del modelado de desajustes se puede mejorar enormemente complementando nuestro planificador con técnicas basadas en datos, como el aprendizaje por refuerzo profundo (DRL). Por lo tanto, una dirección interesante para el trabajo futuro sería guiar la capacitación de una política DRL sólida utilizando demostraciones de expertos confiables que nuestro planificador de manipulación de locomotoras pueda generar rápidamente para resolver un conjunto de tareas desafiantes con una ingeniería de recompensa mínima.
Sobre el autor

|
Jean-Pierre Sleiman obtuvo su licenciatura en ingeniería mecánica de la Universidad Americana de Beirut (AUB), Líbano, en 2016, y su maestría en automatización y management del Politecnico Di Milano, Italia, en 2018. Actualmente tiene un doctorado. D. Candidato en el Robotic Techniques Lab (RSL), ETH Zurich, Suiza. Sus intereses de investigación actuales incluyen la planificación y el management basados en optimización para la manipulación móvil con patas. |

Daniel Carrillo Zapata
Obtuvo su doctorado en robótica de enjambres en el Bristol Robotics Lab en 2020. Ahora fomenta la cultura de la “agitación científica” para entablar conversaciones bidireccionales entre los investigadores y la sociedad.
Daniel Carrillo-Zapata obtuvo su doctorado en robótica de enjambres en el Bristol Robotics Lab en 2020. Ahora fomenta la cultura de la “agitación científica” para entablar conversaciones bidireccionales entre los investigadores y la sociedad.