


{kind=link}
 Un partido de fútbol de RoboCupJunior en acción.
Un partido de fútbol de RoboCupJunior en acción.
En julio de este año, 2.500 participantes se congregaron en Burdeos para RoboCopa2023. La competición comprende varias ligas, y entre ellas se encuentra RoboCupJuniorque está diseñado para presentar RoboCup a los niños en edad escolar, centrándose en la educación. Hay tres subligas: Fútbol, Rescate y OnStage.
Marek Šuppa forma parte del Comité Ejecutivo de RoboCupJunior y nos habló sobre la competencia de este año y los últimos desarrollos en la liga de fútbol.
¿Cuál es tu papel en RoboCupJunior y cuánto tiempo llevas involucrado en esta liga?
Empecé con RoboCupJunior hace bastante tiempo: mi primera competición internacional fue en 2009 en Graz, donde tuve la suerte de competir en fútbol por primera vez. A nuestro equipo no le fue muy bien en ese evento, pero RoboCup causó una profunda impresión y por eso me quedé: primero como competidor y luego para ayudar a organizar la liga de fútbol RoboCupJunior. En este momento estoy sirviendo como parte de los ejecutivos de RoboCupJunior que son responsables de la organización de RoboCupJunior en su conjunto.
¿Cómo estuvo el evento este año? ¿Cuáles fueron algunos de los aspectos más destacados?
Supongo que el tema o eslogan de este año, si le pusiéramos uno, sería “volver a la normalidad”, o algo así. Aunque la RoboCup 2022 ya se celebró de forma presencial en Tailandia el año pasado tras dos años de pausa por la pandemia, su capacidad fue bastante limitada, ya que la COVID-19 todavía afectaba a bastantes regiones. Fue fantástico ver que la comunidad RoboCup pudo perseverar e incluso prosperar durante la pandemia, y que RoboCup 2023 fue una vez más un evento donde se reúnen miles de robots y especialistas en robótica.
También sería difícil hacer justicia a esta pregunta sin agradecer a los organizadores franceses locales. De hecho, estaban listos para organizar el evento en 2020, pero se canceló debido al COVID-19. Pero no abandonaron la concept y lograron organizar un evento increíble este año, por lo cual estamos muy agradecidos.
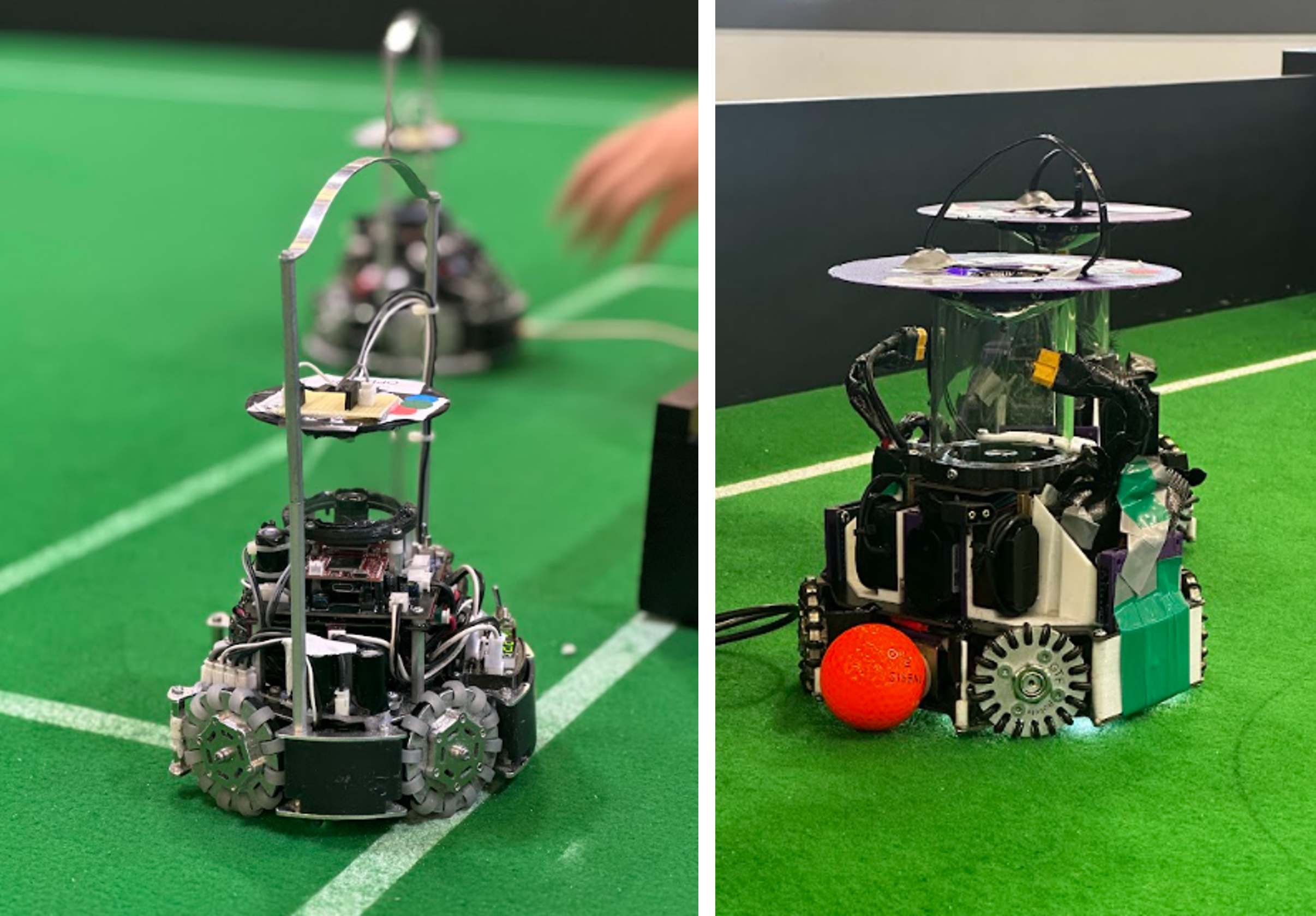 Ejemplos de los robots utilizados por los equipos de Fútbol RoboCupJunior.
Ejemplos de los robots utilizados por los equipos de Fútbol RoboCupJunior.
Volviendo específicamente a RoboCupJunior Soccer, ¿podrías hablar sobre la misión de la liga y cómo ustedes, como organizadores, hacen realidad esa misión?
La misión de RoboCupJunior consta de dos objetivos en competencia: por un lado, debe ser un desafío accesible, interesante y relevante para (en su mayoría) estudiantes de secundaria y, al mismo tiempo, debe estar estrechamente relacionado con el RoboCup “Main”. desafíos, que son abordados por los estudiantes universitarios y sus mentores. Por lo tanto, intentamos continuamente hacerlo más atractivo y cautivador para los estudiantes y, al mismo tiempo, asegurarnos de que sea lo suficientemente técnico como para ayudarlos a crecer hacia los desafíos “principales” de RoboCup.
Una de las formas en que lo hacemos es introduciendo lo que llamamos desafíos “SuperTeam”, en los que equipos de respectivos países forman un llamado “SuperTeam” y compiten contra otro “SuperTeam” como si fueran equipos distintos. En RoboCupJunior Soccer, los “SuperTeams” están compuestos por cuatro o cinco equipos y compiten en un campo que es seis veces más grande que los campos “estándar” que se utilizan para los juegos individuales. Mientras que en los partidos individuales cada equipo puede jugar con dos robots como máximo (lo que resulta en un juego de 2 contra 2), en un partido de SuperTeam cada SuperTeam presenta cinco robots, lo que significa que hay 10 robots que juegan en el campo del SuperTeam durante un partido de SuperTeam. La configuración es muy comparable a la División B del Liga de tamaño pequeño de RoboCup “Main”.
Los juegos SuperTeam existen en RoboCupJunior Soccer desde 2013, es decir, desde hace bastante tiempo, y los comentarios que recibimos sobre ellos fueron abrumadoramente positivos: fue muy divertido tanto para los participantes como para los espectadores. Pero en comparación con los partidos de Small Measurement League todavía había dos diferencias notables: los robots no tenían una forma de comunicarse entre sí y, además, los árbitros no tenían una forma de comunicarse con los robots. El resultado fue que no sólo había poca coordinación entre los robots del mismo SuperTeam, sino que cada vez que period necesario detener el juego, los árbitros tenían que correr físicamente detrás de los robots en el campo para atraparlos y realizar un saque de salida después de marcar un gol. Aunque es gracioso, está lejos de lo que imaginamos que serían los juegos de SuperTeam.
Los módulos de comunicación estándar de RoboCupJunior Soccer tienen como objetivo hacer ambas cosas. El módulo en sí es un pequeño dispositivo que se conecta a cada robotic en el campo SuperTeam. Todos estos dispositivos están conectados vía Bluetooth a un único teléfono inteligente, a través del cual el árbitro puede enviar comandos a todos los robots en el campo. Los propios dispositivos también admiten el intercambio de mensajes directos entre robots en un único SuperTeam, lo que significa que los equipos no tienen que invertir en cómo comunicarse con los otros robots, sino que pueden hacer uso de una plataforma común. Los dispositivos, así como su firmware, son de código abierto, lo que significa no sólo que cada uno puede construir su propio Módulo de Comunicación Estándar si lo desea, sino también que la comunidad puede participar en su desarrollo, lo que lo convierte en una adición interesante a RoboCupJunior Soccer. .
 Los equipos de RoboCupJunior Soccer preparándose para la competición.
Los equipos de RoboCupJunior Soccer preparándose para la competición.
¿Cómo funcionó este nuevo módulo en el concurso? ¿Viste una mejora en la experiencia para los equipos y organizadores?
En esta primera gran prueba pública nos centramos en explorar cómo (y si) estos módulos pueden mejorar la jugabilidad, especialmente los “robots persiguiendo en el saque inicial”. Aunque hemos realizado “experimentos de laboratorio” en el pasado y teníamos alguna evidencia empírica de que debería funcionar bastante bien, esta fue la primera vez que lo probamos en una competencia actual.
Considerándolo todo, diría que fue un experimento muy positivo. Los módulos en sí funcionaron bastante bien y para algunos de nosotros, que teníamos experiencia con la “persecución de robots” mencionada anteriormente, fue una sensación mágica ver a los robots detenerse justo cuando sonaba el silbato del árbitro principal.
También descubrimos áreas potenciales de mejora en el futuro. Los módulos en sí no tienen una fuente de energía propia y fueron alimentados por los propios robots. No pensamos que esto sería un problema, pero en la prueba del “mundo actual” resultó que los niveles de voltaje que los robots son capaces de proporcionar fluctúan significativamente (por ejemplo, cuando el robotic resolve acelerar agresivamente), lo que a su vez significa que algunos de los Los módulos se desconectan cuando el voltaje disminuye significativamente. Sin embargo, terminó siendo una buena lección para todos los involucrados, una lección de la que ciertamente podemos aprender cuando diseñemos las próximas iteraciones.
La transmisión en vivo del día 4 de RoboCupJunior Soccer 2023. Esta transmisión incluye las finales del SuperTeam y los desafíos técnicos. También puedes ver la transmisión en vivo de las semifinales y finales desde el tercer día. aquí.
¿Podrías hablarnos sobre la aparición de modelos de aprendizaje profundo en las ligas RoboCupJunior?
Esto es algo que empezamos a observar en los últimos años y que, en cierta medida, nos sorprendió a los organizadores. En nuestro trabajo diario (es decir, cuando no organizamos RoboCup), muchos de nosotros, los organizadores, trabajamos en áreas relacionadas con la robótica, la informática y la ingeniería en common; algunos de nosotros también investigamos en Inteligencia synthetic y aprendizaje automático. Y aunque siempre pensamos que sería genial ver más investigaciones de vanguardia aplicadas en RoboCupJunior, siempre lo descartamos como algo demasiado avanzado y/o difícil de configurar para los estudiantes de secundaria que componen la mayoría de RoboCupJunior. estudiantes.
Bueno, para nuestra gran sorpresa, algunos de los equipos más avanzados han comenzado a utilizar métodos y tecnologías que están muy cerca del estado precise del arte en diversas áreas, en explicit la visión por computadora y el aprendizaje profundo. Un buen ejemplo serían los detectores de objetos (normalmente basados en la arquitectura yolo), que ahora se utilizan en las tres ligas Junior: en OnStage para detectar varios accesorios, robots y humanos que actúan juntos en el escenario, en Rescue para detectar a las víctimas que los robots están rescatando y en Soccer para detectar el balón, las porterías, y los opositores. Y aunque los participantes generalmente utilizaron implementaciones listas para usar, todavía necesitaban seguir todos los pasos necesarios para una implementación exitosa de esta tecnología: recopilar un conjunto de datos, ajustar el modelo de aprendizaje profundo e implementarlo en sus robots, todo ello. lo cual está lejos de ser trivial y se acerca mucho a cómo se utilizan estas tecnologías tanto en la investigación como en la industria.
Aunque hemos visto solo a los equipos más avanzados utilizar modelos de aprendizaje profundo en RoboCupJunior, esperamos que en el futuro veamos que se vuelve mucho más frecuente, especialmente a medida que la tecnología y las herramientas que lo rodean se vuelven más maduras y sólidas. Sin embargo, demuestra que, a pesar de su edad, los estudiantes de RoboCupJunior están muy cerca de la investigación más avanzada y de las tecnologías más modernas.
 Acción de RoboCupJunior Soccer 2023.
Acción de RoboCupJunior Soccer 2023.
¿Cómo pueden las personas involucrarse en RCJ (ya sea como participantes u organizadores)?
¡Muy buena pregunta!
El mejor lugar para empezar sería el Sitio internet de RoboCupJunior donde se pueden encontrar muchos detalles interesantes sobre RoboCupJunior, las respectivas ligas (como Soccer, Rescue y OnStage) y los representantes regionales relevantes que organizan eventos regionales. Ponerse en contacto con un representante regional es, con diferencia, la forma más sencilla de empezar a utilizar RoboCup Junior.
Además, ciertamente puedo recomendar el Foro RoboCupJuniordonde muchos participantes de RoboCupJunior, pasados y presentes, así como los organizadores, discuten abiertamente muchos temas relacionados. La comunidad es muy amigable para principiantes, así que si RoboCupJunior te parece interesante, ¡no dudes en pasar a saludarnos!
Acerca de Marek Šuppa

|
marek Se topó con la IA cuando period adolescente mientras construía robots jugadores de fútbol y rápidamente se dio cuenta de que no es lo suficientemente inteligente como para hacer toda la programación por sí mismo. Desde entonces, ha estado descubriendo formas de hacer que las máquinas aprendan por sí mismas, especialmente a partir de textos e imágenes. Actualmente se desempeña como científico de datos principal en Slido (parte de Cisco), mejorando la forma en que se llevan a cabo las reuniones en todo el mundo. Manteniéndose fiel a sus raíces, intenta brindar a otros la oportunidad de vivir una experiencia comparable organizando la competencia RoboCupJunior como parte del Comité Ejecutivo. |

AIhub
es una organización sin fines de lucro dedicada a conectar a la comunidad de IA con el público proporcionando información gratuita y de alta calidad en IA.
AIhub es una organización sin fines de lucro dedicada a conectar a la comunidad de IA con el público proporcionando información gratuita y de alta calidad en IA.

Lucy Smith es editora en jefe de AIhub.