


{kind=link}
Hace apenas dos años, una pequeña mantarraya robótica se convirtió en el robotic de cuerpo blando que nada más rápido del mundo. Bueno, uno de sus descendientes ha batido ese récord y utiliza menos energía que su predecesor, para empezar.
El de 22,8 mm de largo robots originales fue diseñado por Assoc. Prof. Jie Yin y colegas de la Universidad Estatal de Carolina del Norte.
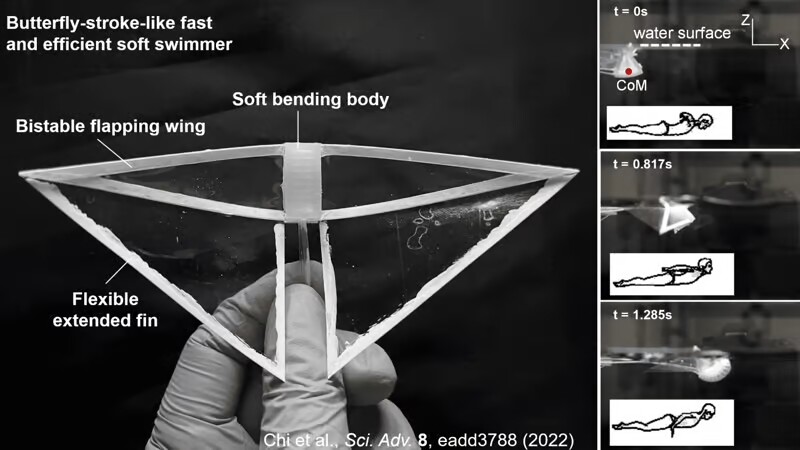
Presentaba dos alas flexibles de poliéster parecidas a las de una mantarraya, que en realidad eran los extremos izquierdo y derecho de una única estructura biestable curva. La biestabilidad se refiere a la capacidad de una estructura tensada para permanecer en cualquiera de dos posiciones sin requerir energía para hacerlo; una pinza para el cabello es un buen ejemplo de estructura biestable.
Universidad Estatal de Carolina del Norte
La mitad de la estructura del ala biestable del robotic estaba intercalada entre actuadores neumáticos de silicona blanda superior e inferior.
Cuando se bombeaba aire al actuador superior, se doblaba hacia arriba y tiraba del centro de la estructura del ala, lo que hacía que se “encajara” en una posición que arrastraba las dos alas hacia abajo. Cuando se desinfló el actuador superior y el abajo uno se infló, la estructura se rompió en la dirección opuesta, levantando las alas nuevamente. El mecanismo se demuestra en el siguiente vídeo.
Un suave nadador robótico parecido a una mariposa que es rápido y eficiente
Al activar los dos actuadores hacia adelante y hacia atrás de esta manera (a través de una bomba de aire externa), fue posible batir las alas lo suficientemente rápido para una velocidad de natación promedio de 3,74 longitudes corporales por segundo. Según los científicos, esto fue aproximadamente cuatro veces más rápido de lo que antes period posible con los robots nadadores de cuerpo blando.
En el modelo de 68 mm de largo nuevo robo-manta, Yin y su equipo eliminaron el diseño biestable junto con el actuador inferior. La estructura del ala versatile ahora es monoestable, lo que significa que siempre volverá a una sola posición (curvada hacia abajo en el medio con las alas hacia arriba) cuando no se aplica energía.
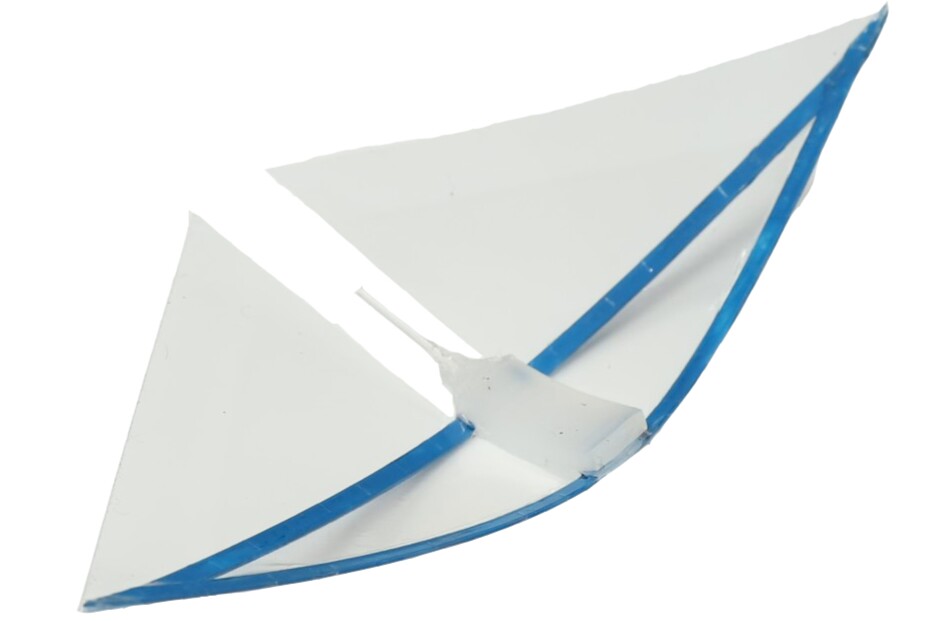
Haitao Qing, Universidad Estatal de Carolina del Norte
Al inflarse, el actuador neumático superior único se curva hacia abajo y tira hacia abajo del centro de la estructura del ala, lo que hace que las alas se rompan hacia abajo. Sin embargo, tan pronto como se permite que el actuador se desinfle, la fuerza de restauración elástica de la estructura hace que vuelva a su posición predeterminada, empujando las alas hacia arriba en el proceso.
Entonces, mientras que el robotic authentic tenía que tomarse el tiempo y la energía para inflar y desinflar alternativamente dos actuadores por ciclo de aleteo hacia arriba y hacia abajo, el nuevo robotic solo tiene que activar uno. Esta mejora le da al robotic una velocidad de natación promedio de 6,8 longitudes corporales por segundo, mientras devour 1,6 veces menos energía que el authentic.
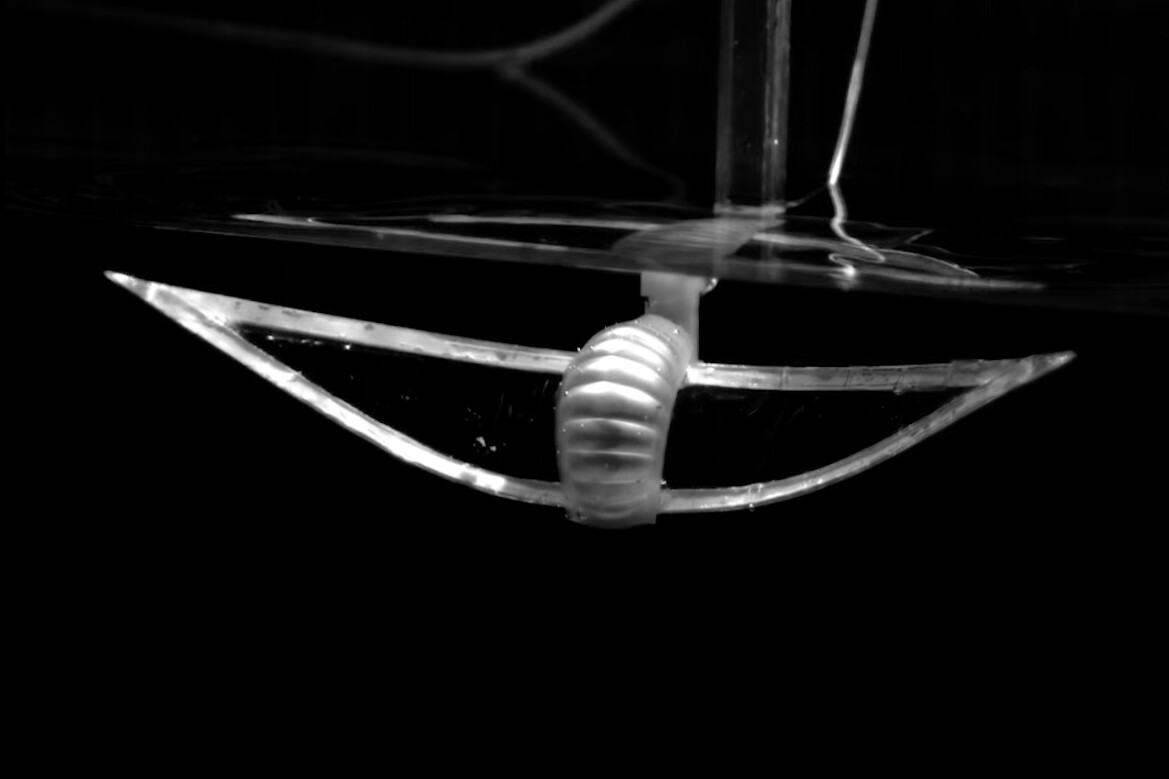
Haitao Qing, Universidad Estatal de Carolina del Norte
Además, el nuevo diseño permite que el robotic se mueva verticalmente dentro de la columna de agua simplemente variando su velocidad de nado.
“Cuando las aletas del robotic están en reposo, la cámara de aire está vacía, lo que cut back la flotabilidad del robotic. Y cuando el robotic mueve sus aletas lentamente, las aletas están en reposo con más frecuencia”, cube el estudiante de doctorado Haitao Qing, primer autor del estudio. . “En otras palabras, cuanto más rápido agita el robotic sus aletas, más tiempo estará llena la cámara de aire, lo que la hace más flotante”.
Los científicos ahora están trabajando en un método para dirigir lateralmente el robotic, con miras a aplicaciones futuras como la exploración de océanos y la observación de la vida silvestre acuática. Puedes ver su acción en el vídeo a continuación.
Recientemente se publicó un artículo sobre el estudio en la revista Avances científicos.
Robots de natación suaves, rápidos y maniobrables, inspirados en las mantarrayas