


{kind=link}
En un avance que no es nada espeluznante, los científicos han ideado un método para anclar piel humana viva a las caras de los robots. En realidad, la tecnología podría tener algunas aplicaciones valiosas, más allá de hacer mundo occidental-Escenarios parecidos a una realidad.
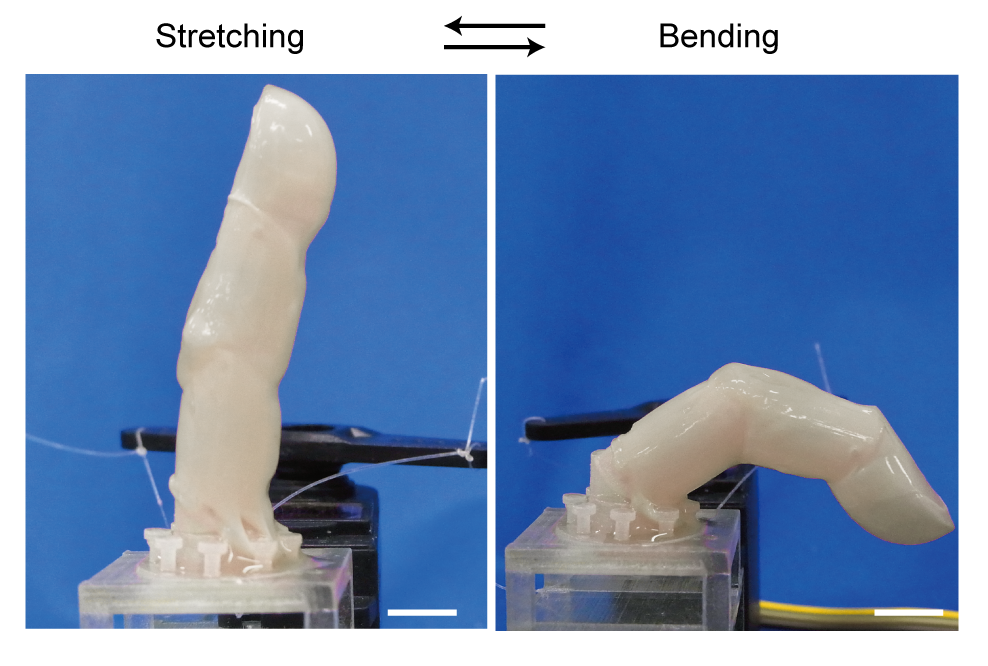
Hace dos años, el profesor Shoji Takeuchi y sus colegas de la Universidad de Tokio lograron cubrió un dedo robótico motorizado con una piel de bioingeniería elaborado a partir de células humanas vivas.
Se esperaba que este ejercicio de prueba de concepto pudiera allanar el camino no sólo para robots tipo Android más realistas, sino también para robots con cubiertas autocurativas y sensibles al tacto. La tecnología también podría utilizarse en la prueba de cosméticos y en la formación de cirujanos plásticos.
©2022 Takeuchi et al.
Si bien el dedo cubierto de piel fue sin duda un logro impresionante, la piel no estaba conectada al dedo subyacente de ninguna manera: period básicamente una funda que envolvía el dedo. Por el contrario, la piel del rostro humano pure está unida al tejido muscular subyacente mediante ligamentos compuestos de tejido conectivo.
Entre otras cosas, esta disposición nos permite exhibir nuestras diversas expresiones faciales. Además, al avanzar con El tejido subyacente, la piel no impide los movimientos faciales al amontonarse. Por esta misma razón, también es menos possible que se dañe al engancharse con objetos externos.
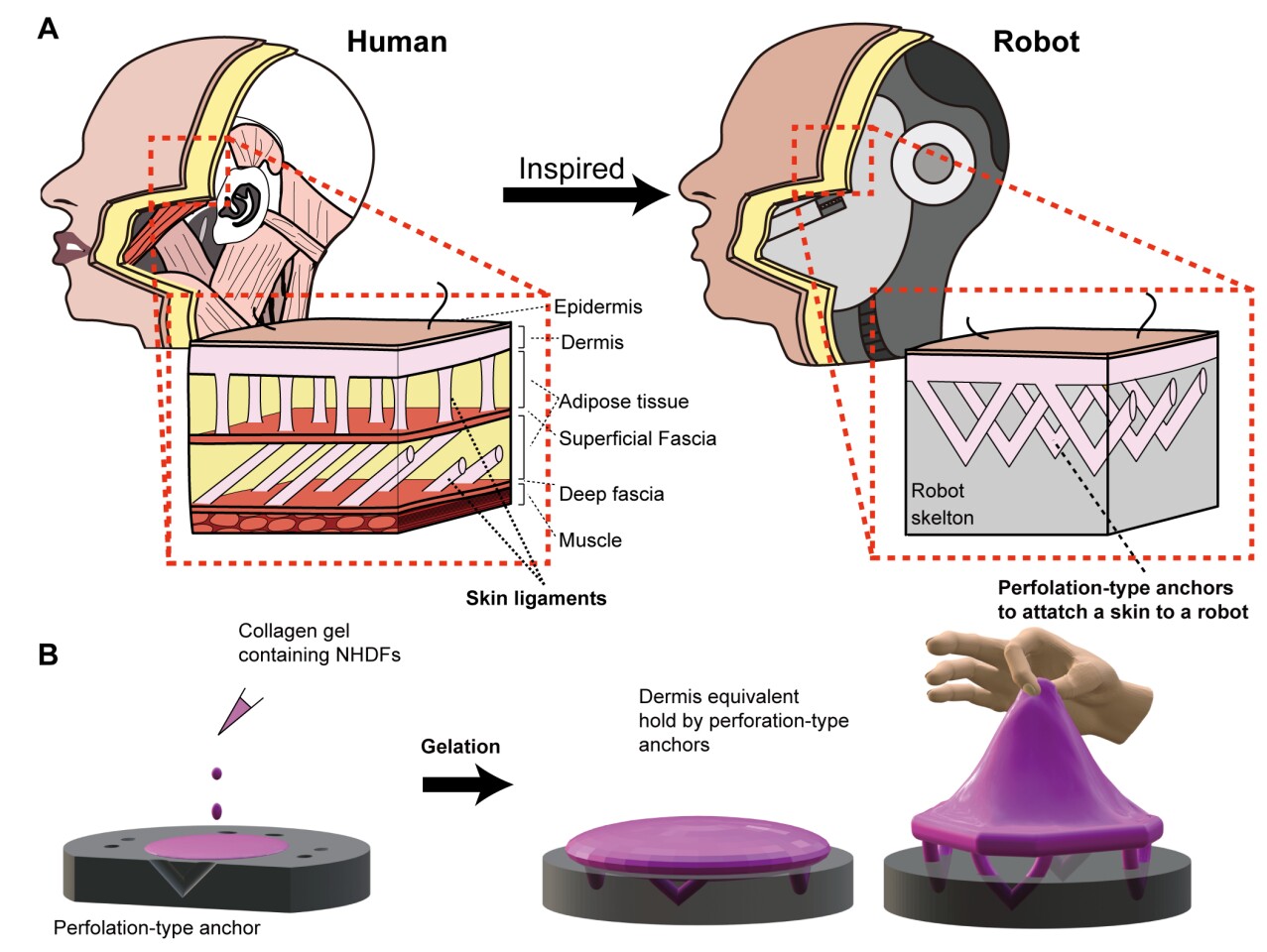
Los científicos han intentado anteriormente conectar la piel creada mediante bioingeniería con superficies sintéticas, generalmente a través de pequeños anclajes que sobresalen. de esas superficies. Sin embargo, estas pequeñas anclas restan valor a la apariencia de la piel y evitan que luzca suave. Tampoco funcionan bien en superficies cóncavas, donde todas apuntan hacia el centro.
Teniendo en cuenta estas limitaciones, Takeuchi y su equipo desarrollaron recientemente un nuevo sistema de anclaje a la piel basado en pequeñas perforaciones en forma de V realizadas en la superficie sintética.
©2024 Takeuchi et al. CC-BY-ND
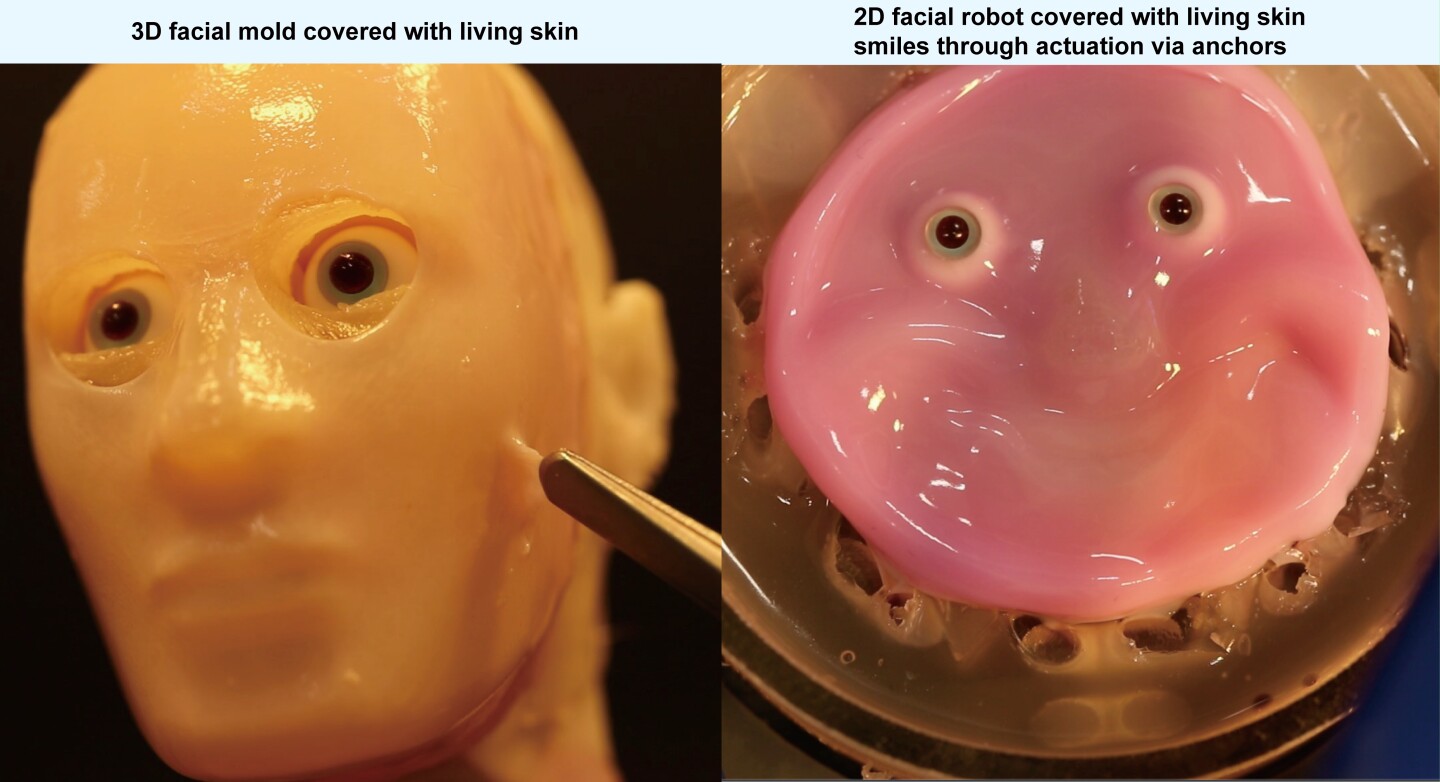
Los científicos crearon un molde facial humano que incorporaba una serie de estas perforaciones y luego recubrieron ese molde con un gel que consiste en colágeno y fibroblastos dérmicos humanos. Estas últimas son células que se encargan de producir tejido conectivo en la piel.
Parte del gel fluyó hacia las perforaciones, mientras que el resto permaneció en la superficie del molde. Después de dejarlo en cultivo durante siete días, el gel formó una cubierta de piel humana que se ancló de forma segura al molde a través del tejido dentro de las perforaciones.
En un segundo experimento, se realizaron perforaciones en un sustrato de caucho de silicona, al que posteriormente se aplicó el gel y luego se dejó cultivar. El resultado ultimate fue una cara simplificada de piel humana a la que se podía hacer sonreír moviendo dos varillas conectadas al sustrato.
©2024 Takeuchi et al. CC-BY-ND
No hace falta decir que aún queda trabajo por hacer antes de que la tecnología pueda utilizarse en robots verdaderamente realistas.
“Creemos que se puede crear una piel más gruesa y realista incorporando glándulas sudoríparas, glándulas sebáceas, poros, vasos sanguíneos, grasa y nervios”, afirma Takeuchi. “Por supuesto, el movimiento también es un issue essential, no sólo el materials, por lo que otro desafío importante es crear expresiones similares a las humanas mediante la integración de actuadores o músculos sofisticados dentro del robotic”.
Recientemente se publicó un artículo sobre la investigación en la revista Informes Celulares Ciencias Físicas.
Fuente: Universidad de Tokio